ns-3 transition from waf to CMake
Introduction
The ns-3 network simulator is one of the most used network simulators in the academia, however, it has a very steep learning curve, especially when you are still learning C++ and the standards themselves.
Not their fault in any way, it is just that modeling complex systems is hard by itself.
Ever-evolving standards, adding more and more features as the time goes while keeping backwards compatibility also doesn’t help.
What can we do to help?
Better guides? Maybe, but I do not think they help as much. If it was something interactive, it could be pretty cool. I have tried setting up Jupyter notebooks for more interactive guides using the power of Cling-Xeus.
Better examples? Maybe. Some examples are very simple while we have much more complicated scenarios in published papers.
Better docs? I personally don’t think they help as much when you’re already lost.
Maybe include a parser to be able to describe the simulations from a higher level description language like other simulators do? That does not sound like a bad idea, since setting up some things can be quite complicated if you are just getting started.
Better tooling? This is where I come in.
Build systems
Something so simple as a build system should not be such a problem, am I right? Well, it is not if you already know what you are doing, how to get things done, etc.
If you are part of the group just getting started into everything at once, it is overwhelming and your productivity is basically none for a while, which can be frustrating. I was one of these.
So, how bad can it really be? Well, pretty bad. Since I have been used to IDEs, where projects can be organized neatly, settings are managed graphically, auto-completion works, coding mistakes are properly highlighted, you can easily navigate and refactor the code and my preferred feature: VISUAL DEBUGGING.
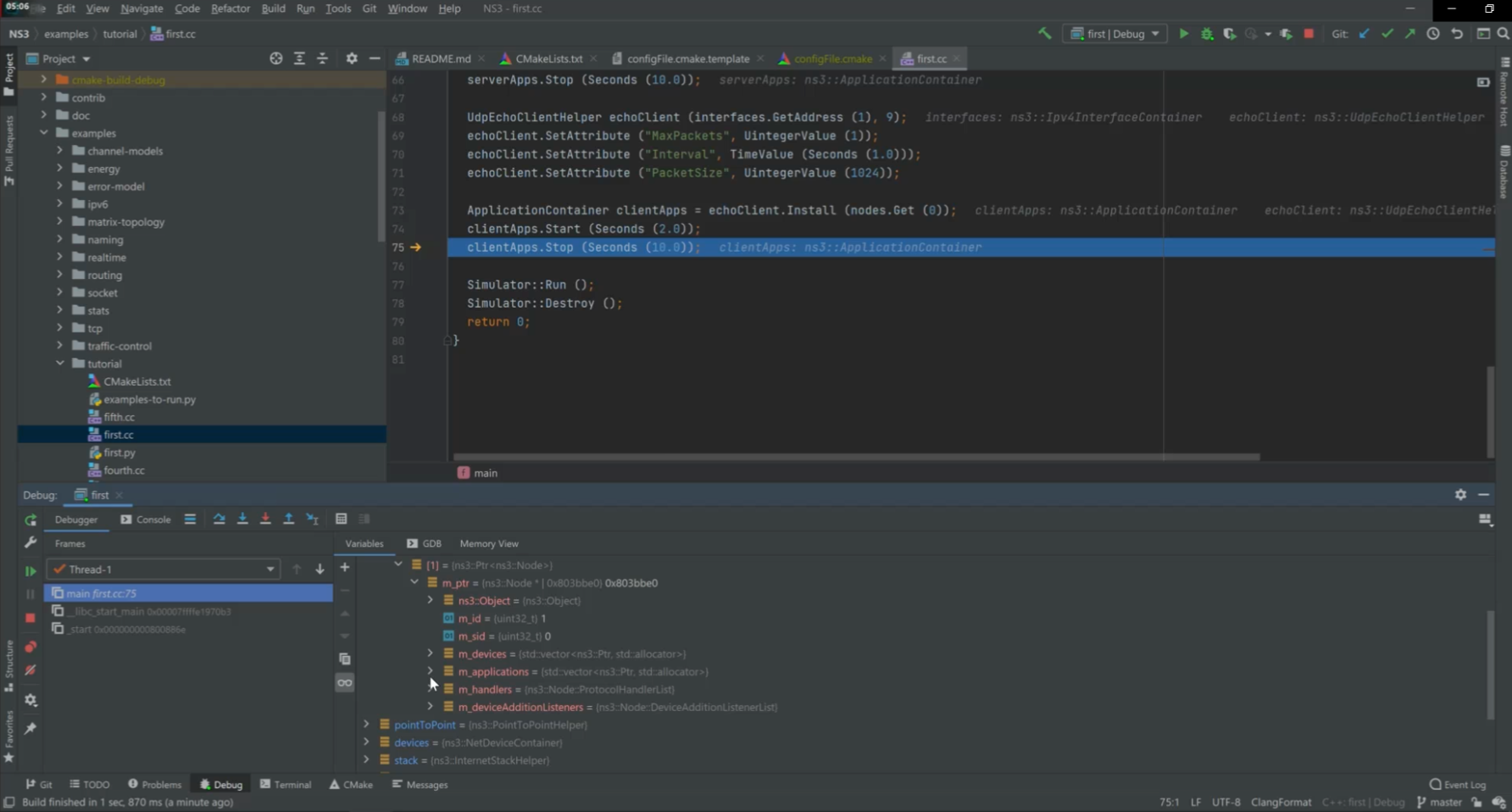
Yes, I like visual debuggers. Really like them. For a few reasons, being the following two the main ones:
I can see the values of the variables not only in the memory watches panels, but inlined into the code
I can see the callstack
But you may ask me: -What the devil build systems got to do with visual debugging?.
And that is a pretty good question. While build systems do not prevent you from using visual debuggers, it limits the amount of information and insights you can get from the code. Some IDEs, for example, do not even allow for that.
Why all of this matters? WAF.
Waf is a pretty cool build system written entirely in Python and is supper easy to distribute with your project, so it needs only Python installed (which you would probably already have anyways) and whatever your project needs to get build (e.g. compiler).
ns-3 have been using Waf for a while, and it has been working well for quite a long time, which goes to show it is not a bad build system in any way.
My grudges with Waf is just that it does not support IDEs and the organization in different steps, plus how things are organized seem overly complicated for me. What I dislike the most however is that it does not produce intermediary build system files that I can inspect visually and discover what I am doing wrong.
So I started working on CMake support...
ns-3 with CMake
Since I started my masters, my advisor said I should start working with ns-3. If it was not for that, I would probably be using ns-2 or OMNET++.
Anyways, so I started rewriting everything ns-3 needed on CMake. Took quite some time to write everything, since I was not only translating Waf, but "reverse engineering". I admit this was pretty stupid, but I simply could not understand how Waf did its magic (if it had written makefiles or something like that, it would have been easier and faster).
Since 2018 I have been gathering feedback and refactoring everything to upstream that support, which seems like it is going to happen soon (release 3.36).
With CMake, all major IDEs are supported from the get go: Microsoft Visual Studio and Visual Code, Jetbrains CLion, Apple XCode, Code::Blocks, Eclipse, CodeLite and others.
Of course CMake can also be called directly via the command-line, but commands are very verbose.
Command-line users will be happy to know they were not forgotten with the ns3 wrapper script for CMake (previously known as fakewaf and ns3waf). The script provides pretty much the same functionality expected from Waf, including exporting library paths, making programs just work instead of having to export the path first.
My suggestion: use the ns3 wrapper when you need it. For example, when using IDEs that do not natively support CMake projects such as Xcode, Code::Blocks and Eclipse, you will need to specify the proper CMake Generator to get a project for them. Also, you will need to close the IDE, refresh the CMake cache manually (re-run ’ns3 configure’) whenever you add/remove a source file, create a new module or add a new dependency (either module or library), then you can open the IDE once again and continue using. I know it is pretty bad and that is why I suggest either CLion (my preferred IDE) or VsCode, which works surprisingly well with CMake.
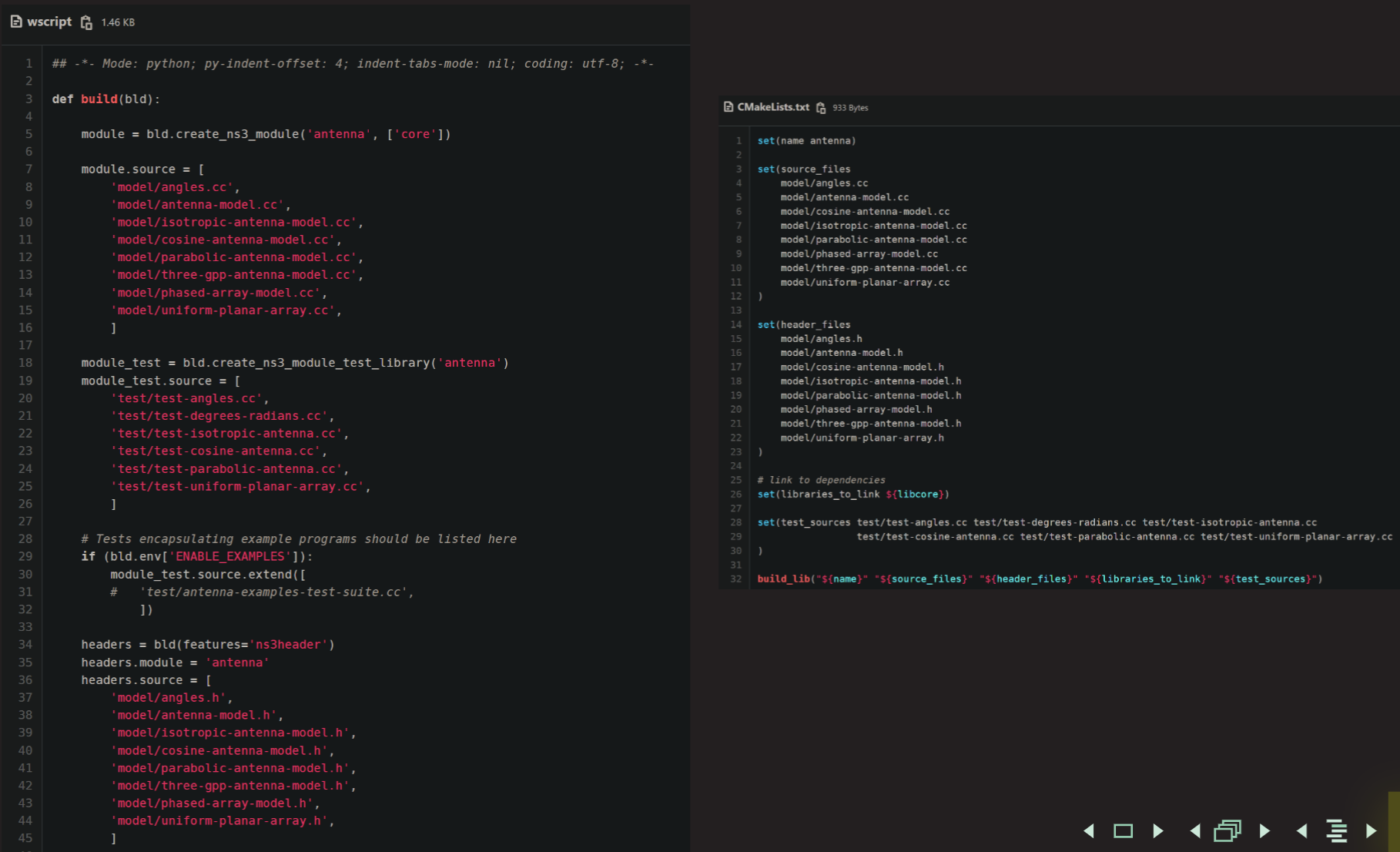
What changes for a module developer?
Not that much. I have purposefully made it very similar to make the transition as smooth as possible. Copy and paste source lists to the appropriate variables, then clean semicolons and quotes and you are good to go if your module does not have any special needs (e.g. external library or options).
If you need user-provided paths to look for libraries, you can follow example from the brite:
# This part is similar the conf part in a wscript
# I know it is pretty confusing, but this is due to CMake limitations
#
# First we declare/set a variable that points to a PATH in the CMake CACHE
# (a.k.a. this value won't be lost accross runs)
# Then we declare/set a variable also stored in the cache,
# but now it is used INTERNALly by us to determine if BRITE was
# found in the NS3_WITH_BRITE path
set(NS3_WITH_BRITE "" CACHE PATH "Build with brite support")
set(NS3_BRITE "OFF" CACHE INTERNAL "ON if Brite is found in NS3_WITH_BRITE")
# If a path for Brite was not given, we just skip the entire module
# and pretend it does not exist
if(NOT NS3_WITH_BRITE)
return()
endif()
# If a path for Brite was given, we search for both the library and
# the header in the NS3_WITH_BRITE folder
find_library(brite_dep brite
PATHS ${NS3_WITH_BRITE}
PATH_SUFFIXES /build /build/lib /lib
)
find_file(brite_header Brite.h
HINTS ${NS3_WITH_BRITE}
PATH_SUFFIXES /build /build/include /include
)
# If both are not found, we return a message indicating it is the
# case and stop processing this module by returning to the src folder
if(NOT (brite_dep AND brite_header))
message(STATUS "Brite was not found in ${NS3_WITH_BRITE}")
return()
endif()
# If both were found, we get the directory containing
# the brite header and use it as an include folder
get_filename_component(brite_include_folder ${brite_header} DIRECTORY)
include_directories(${brite_include_folder})
# We also set the NS3_BRITE variable, indicating it was found
set(NS3_BRITE "ON" CACHE INTERNAL "ON if Brite is found in NS3_WITH_BRITE")
# your module name (in this case brite, which can be used by other libraries
# including ${libbrite} in their libraries_to_link variable)
set(name brite)
# your source files
set(source_files helper/brite-topology-helper.cc)
# your header files
set(header_files helper/brite-topology-helper.h)
# link to dependencies
set(libraries_to_link
${libnetwork} # notice the ns-3 modules required by libbrite
${libcore}
${libinternet}
${libpoint-to-point}
${brite_dep} # notice the brite_dep library
)
# your test source files
set(test_sources test/brite-test-topology.cc)
# The magic macro that does Waf-like magic
build_lib("${name}"
"${source_files}"
"${header_files}"
"${libraries_to_link}"
"${test_sources}"
)If you need to find a library with a FindPackage(), the config-store module serves as an example:
# Search for HarfBuzz and GTK3
# (we currently do this in ns-3-dev/buildsupport/macros_and_definitions.cmake)
# Only check for GTK3 if the user set this flag
# (currently in ns-3-dev/CMakeLists.txt)
if(${NS3_GTK3})
find_package(HarfBuzz QUIET)
if(NOT ${HarfBuzz_FOUND})
message(STATUS "Harfbuzz is required by GTK3 and was not found.")
else()
set(CMAKE_SUPPRESS_DEVELOPER_WARNINGS 1 CACHE BOOL "")
find_package(GTK3 QUIET)
unset(CMAKE_SUPPRESS_DEVELOPER_WARNINGS CACHE)
if(NOT ${GTK3_FOUND})
message(STATUS "GTK3 was not found. Continuing without it.")
else()
message(STATUS "GTK3 was found.")
endif()
endif()
endif()
# Search for LibXml2
# we currently do this in buildsupport/macros_and_definitions.cmake)
find_package(LibXml2 QUIET)
if(NOT ${LIBXML2_FOUND})
message(STATUS "LibXml2 was not found. Continuing without it.")
else()
message(STATUS "LibXml2 was found.")
add_definitions(-DHAVE_LIBXML2)
endif()
set(name config-store)
# add optional sources if an optional GTK3 dependency is found
if(${GTK3_FOUND})
set(gtk3_sources model/display-functions.cc
model/gtk-config-store.cc
model/model-node-creator.cc
model/model-typeid-creator.cc
)
set(gtk3_headers model/gtk-config-store.h)
include_directories(${GTK3_INCLUDE_DIRS} ${HarfBuzz_INCLUDE_DIRS})
set(gtk_libraries ${GTK3_LIBRARIES})
endif()
# add optional sources if an optional LibXml2 dependency is found
if(${LIBXML2_FOUND})
set(xml2_sources model/xml-config.cc)
set(xml2_libraries ${LIBXML2_LIBRARIES})
include_directories(${LIBXML2_INCLUDE_DIR})
endif()
# add optional sources to the source_files list
set(source_files
${gtk3_sources}
${xml2_sources}
model/attribute-default-iterator.cc
model/attribute-iterator.cc
model/config-store.cc
model/file-config.cc
model/raw-text-config.cc
)
# add optional header to the header_files list
set(header_files ${gtk3_headers} model/file-config.h model/config-store.h)
# add optional libraries to the libraries_to_link list
set(libraries_to_link ${libcore} ${libnetwork} ${xml2_libraries} ${gtk_libraries})
set(test_sources)
build_lib("${name}"
"${source_files}"
"${header_files}"
"${libraries_to_link}"
"${test_sources}"
)
You may ask: -Is there yet another way of finding libraries?. And the answer could not be other than: of course there is.
For libraries that use pkg-config, you can follow the fd-net-device example.
# Include CMake script to use pkg-config
include(FindPkgConfig)
# If pkg-config was found, search for dpdk
if(PKG_CONFIG_FOUND)
pkg_check_modules(DPDK libdpdk)
endif()
...
# Reset cached variable
set(ENABLE_DPDKDEVNET False CACHE INTERNAL "")
...
# Set cached variable if both pkg-config and libdpdk are found
if(PKG_CONFIG_FOUND AND DPDK_FOUND)
set(ENABLE_DPDKDEVNET True CACHE INTERNAL "")
endif()The end
Feel free to provide feedback either on the ns-3-users group, via the open MR.
You can also find me on the ns-3 Zulip.